Image Annotations
At NAVA-DC, we provide high accuracy, precise and scalable image annotation services for any data creation project. We cater to every image annotation technique as seen below to create customized datasets according to the requirement. We assure you that all the datasets we create in our studio are properly licensed and 100% compiles with GDPR.

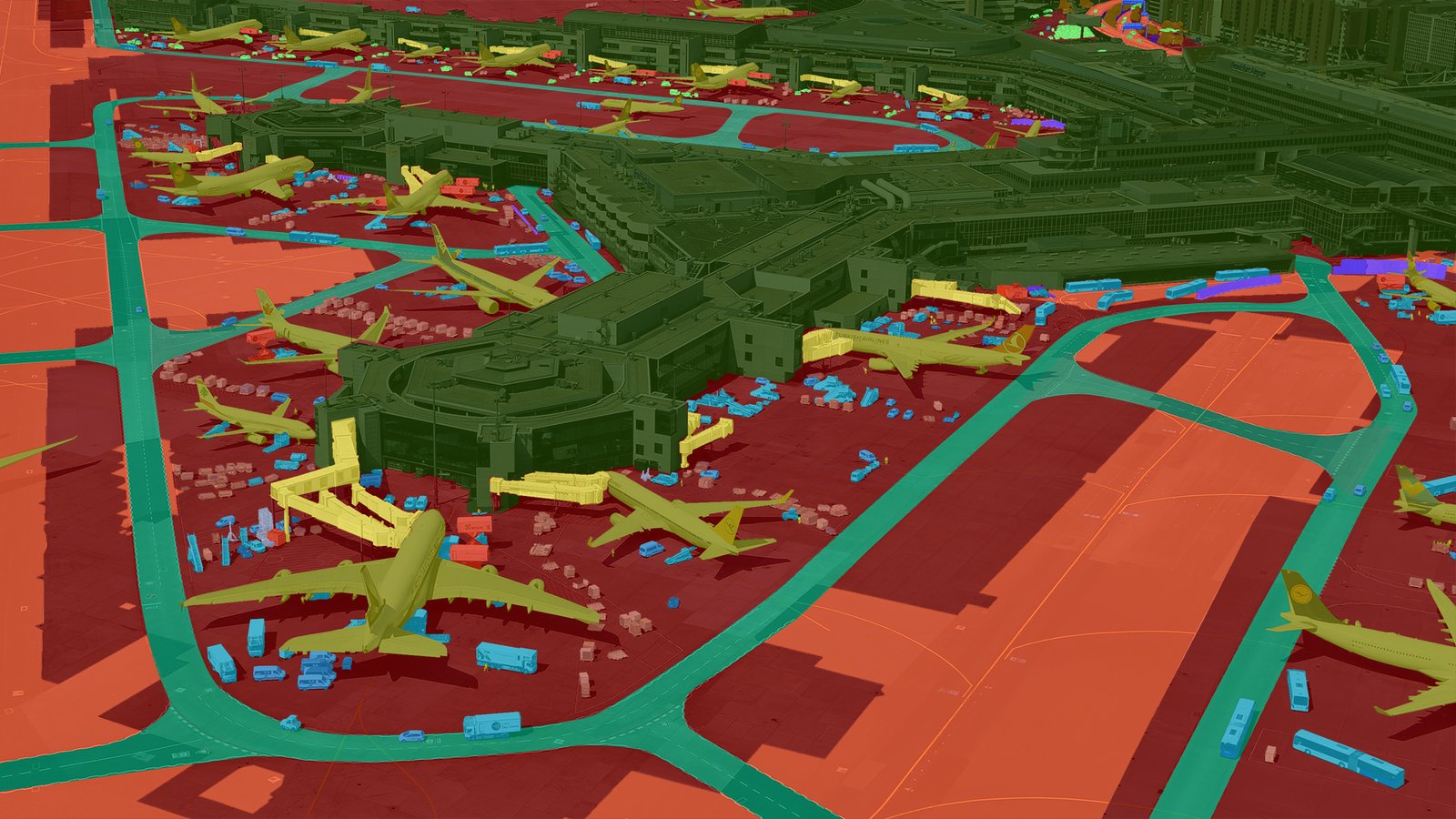
Semantic Segmentation
The Semantic Segmentation annotation helps to train your computer AI to differentiate the objects in your 2D image with pixel-based classification by drawing accurate outlines around the edges of an object and linking it to a class label. The labels can include anything from a person to a flower. There’s no limit to that.
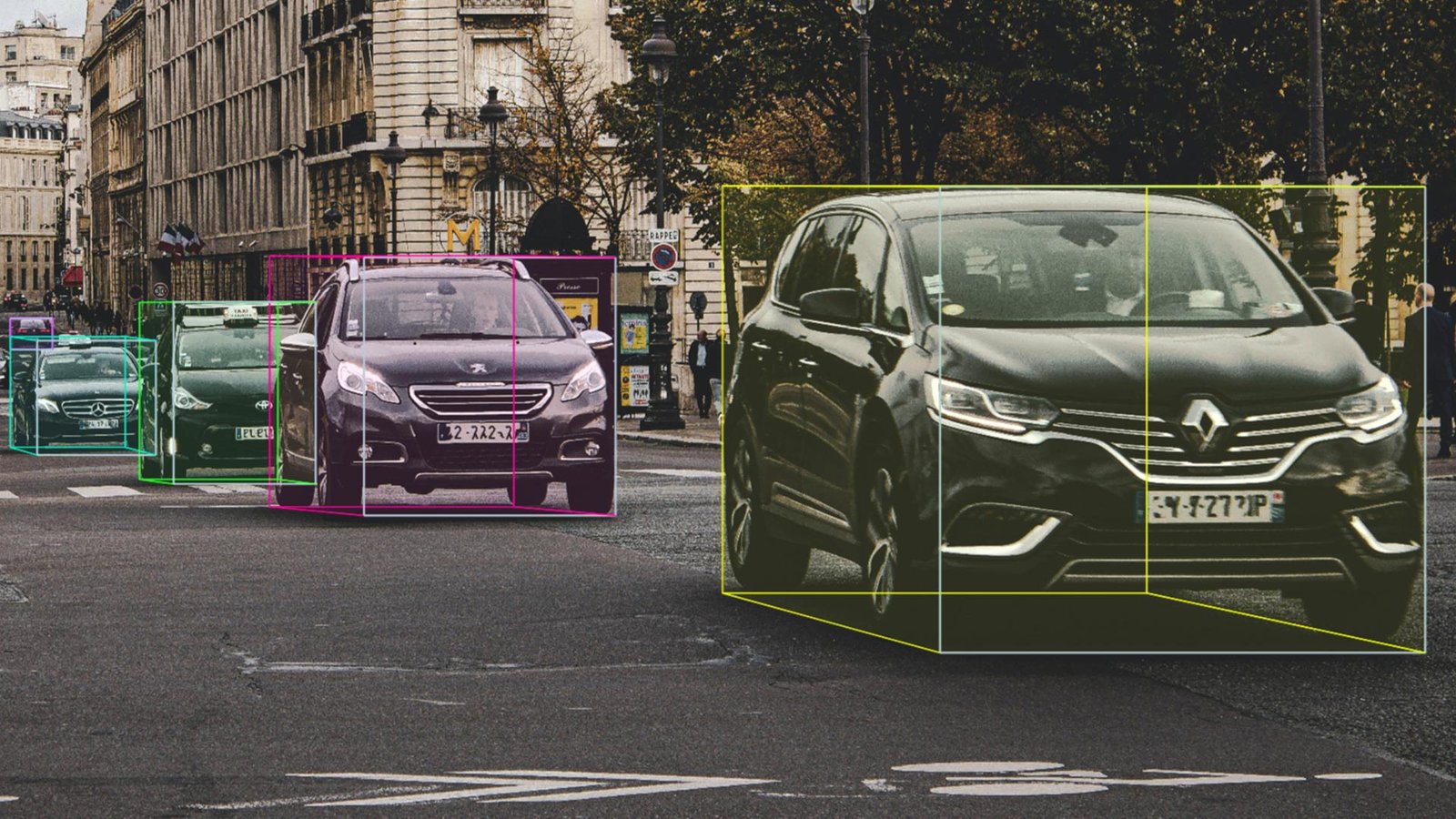
Cuboid
Train your computer vision model to annotate 3D objects by adding 3D boxes in your 2D images to detect the precise dimension of the vehicle and annotate them with 3D cuboid-shaped objects. This precise data will help to improve your self-driving AI computer to understand better with real-world datasets.



Lines & Splines
The line & Splines are mainly used to train the lanes & the boundaries to the machine learning computer. This annotates the data by simply drawing the lines along the boundaries of the road that will help your computer to learn and differentiate the objects better.
Landmark
Train your computer to label key areas at specified locations to learn the facial movements or body expressions. This type of annotation can be used for various sizes of objects without any limits. This type of annotation is mainly used for body movement, human poses, facial expressions, and more.




Polygon
Create and label irregular shape objects in the picture as inputs for your datasets easily. The Polygon Annotation is mainly used to detect & gather data from asymmetrical objects and make them easily recognizable for computers to understand and learn.
Bounding Box
This is one of the most common Image annotation methods where imaginary rectangle boxes around the objects are created. This acts as a reference point for detection and collision. The main use case of this annotation is to help the computers recognize objects, understand the surroundings for self-driving vehicles.

